社区
Unity3D
帖子详情
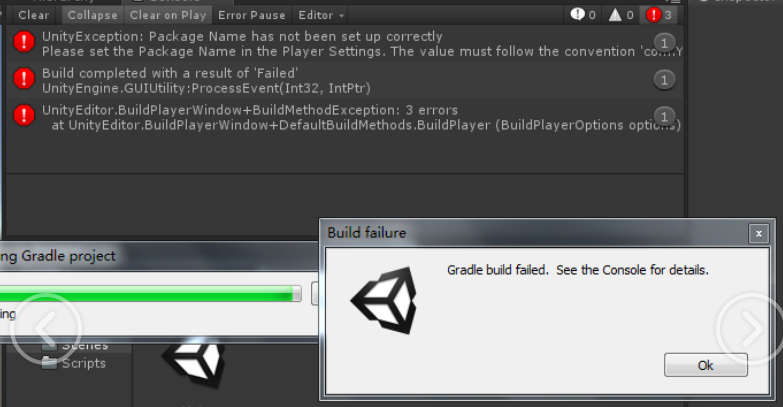
[unity] 打包时报错 gradle build failed.see the console for details,求助
qq_41835219
2018-03-13 07:21:35
...全文
6727
4
打赏
收藏
[unity] 打包时报错 gradle build failed.see the console for details,求助
[图片]
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
4 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
Moment格调
2019-12-23
打赏
举报
回复
1
已解决这个问题,解决方法是使用控制台安装安卓SDK,这样既可以较少安装文件包体大小,又能解决版本问题。解决方法已上传到哔哩哔哩视频网站。地址:https://www.bilibili.com/video/av80316000?from=search&seid=13142140292596308879
YTJSCNM
2019-07-23
打赏
举报
回复
打包安卓设置一下打包出来的名称 com.公司名.产品名称就可以了
元青..
2019-06-27
打赏
举报
回复
首先看有没有中文路径,全改英文。
将项目所属的vs关闭,ok再试试 我的就这样解决了
linyu0219
2018-03-14
打赏
举报
回复
新人怀疑gradle没有安装好,可以暂时把build setting 那里build 方式 由gradle 改为internal gradle怎么安装不会了,可能android studio 新建一个空白project就可以安装了,可能需要外网
论文复现基于双锁相环阻抗重塑控制策略的弱电网下跟网型逆变器干扰稳定性分析(Simulink仿真)
内容概要:本文针对弱电网环境下跟网型逆变器易受电网阻抗波动和外部干扰影响而导致系统不稳定的问题,提出一种基于双锁相环(Dual Phase-Locked Loop, DPLL)的阻抗重塑控制策略。通过在Simulink中构建详细的逆变器并网系统仿真模型,重点分析高频与工频运行条件下系统的阻抗特性变化,利用双锁相环结构对逆变器输出阻抗进行动态调节,从而增强系统对弱电网的适应能力。该方法通过重构控制环路,提升系统的相位裕度与稳定性裕度,有效抑制由电网强度不足引发的振荡现象,确保逆变器在复杂电网条件下的可靠并网运行。研究结合控制理论、阻抗分析方法与电力电子系统建模技术,为解决实际工程中逆变器并网稳定性问题提供了可行的技术路径与仿真验证手段。; 适合人群:电力电子、新能源并网、电力系统自动化等相关专业的研究生、科研人员及从事逆变器控制算法开发的工程技术人员。; 使用场景及目标:①研究弱电网条件下跟网型逆变器的稳定性机理;②掌握双锁相环在阻抗重塑中的应用方法;③通过Simulink搭建并网逆变器控制系统模型,复现论文结果并进行稳定性分析;④为实际逆变器控制器设计提供理论支持与仿真验证手段。; 阅读建议:建议读者结合电力系统阻抗分析、锁相环原理及现代控制理论背景知识进行学习,重点关注双锁相环结构的设计逻辑与阻抗重塑的实现路径,并动手实践Simulink仿真模型以加深理解。
【感知实战·数据增强篇】深度解析目标检测中的图片数据增强算法,多图演示效果
目标检测中的图片数据增强算法汇总
常见十大ADC滤波算法C程序实现(限幅滤波-中值滤波-加权递推滤波-滑动平均滤波-一阶滞后滤波等)
内容概要:本文详细介绍了常见的十大ADC滤波算法及其C语言程序实现,包括限幅滤波、中值滤波、加权递推滤波、滑动平均滤波、一阶滞后滤波等多种数字滤波方法。每种算法均从核心原理出发,结合实际应用场景进行解析,并提供了结构清晰、简洁高效的C代码实现示例,重点突出对模拟信号采集过程中噪声干扰的抑制能力与信号平滑处理效果。内容涵盖算法设计思想、参数选取策略及适用条件,帮助开发者在嵌入式系统中有效提升ADC采样数据的精度、稳定性和抗干扰能力。; 适合人群:具备C语言编程基础和嵌入式系统开发经验,从事单片机、STM32、传感器数据采集、工业自动化或物联网设备研发的工程师,以及电子类、自动化类相关专业的本科及以上学历学生。; 使用场景及目标:①用于消除ADC采样中的随机噪声、脉冲干扰、信号抖动等异常数据;②提升数据采集系统的可靠性与稳定性,广泛应用于智能仪表、工业控制、环境监测、传感器模块和消费类电子产品中;③辅助开发者根据具体应用需求(如响应速度、滤波强度、资源消耗)选择最优滤波方案并快速集成至实际项目中。; 阅读建议:建议结合具体的硬件平台对各类滤波算法进行实测对比,重点关注其在不同噪声环境下的滤波效果、算法响应延迟及CPU资源占用情况,并根据实际信号特性调整滤波参数以实现性能最优化。
Possum_Regression.zip
Possum_Regression.zip
【多无人机动态避障路径规划】基于蚁狮优化算法(ALO)求解复杂三维环境下多无人机动态避障路径规划问题(Matlab代码实现)
内容概要:本文详细介绍了基于蚁狮优化算法(ALO)在复杂三维环境中实现多无人机动态避障路径规划的Matlab代码实现方法。通过构建包含静态与动态障碍物的三维环境模型,利用ALO算法强大的全局搜索能力和收敛性能,求解多无人机系统在飞行过程中的最优或近似最优路径,确保各无人机在满足避碰约束的同
时
实现高效协同导航。文中系统阐述了路径规划的数学建模过程、适应度函数设计、约束条件处理机制以及ALO算法的具体实现流程,并通过仿真实验验证了该方法在路径平滑性、避障成功率、算法收敛速度等方面的优越性能。; 适合人群:具备一定Matlab编程基础,从事智能优化算法、无人机控制、路径规划、多智能体协同等方向研究的科研人员、高校研究生及自动化相关领域的工程技术人员。; 使用场景及目标:①应用于复杂三维城市环境或多障碍场景下的多无人机自主导航与动态避障任务;②为智能交通、灾害救援、边境巡检、军事侦察等实际应用场景中的多智能体协同路径规划提供算法支持与仿真验证平台;③帮助研究人员深入理解群智能优化算法(如ALO)在复杂路径规划问题中的建模思路、实现细节及其相较于其他智能算法(如PSO、CSO)的性能优势与适用边界。; 阅读建议:建议结合提供的Matlab代码进行仿真实践,重点剖析目标函数构造与参数调优策略,同
时
可通过替换不同环境地图或对比其他优化算法在同一场景下的表现,深化对ALO算法特性与路径规划机制的理解。
Unity3D
2,589
社区成员
2,147
社区内容
发帖
与我相关
我的任务
Unity3D
Unity3D相关内容讨论专区
复制链接
扫一扫
分享
社区描述
Unity3D相关内容讨论专区
游戏
unity
技术论坛(原bbs)
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
Unity3D社区公告:
社区致力于解决各种Unity3D相关的“疑难杂症”。
社区不允许发布与Unity3D或相关技术无关内容。
社区版主邀请各位一道为打造优秀社区不懈努力。
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享





