作为Ardupilot和PIXHAWK的多年老玩家,一直被磁罗盘报错折磨。此前看到有朋友用双天线设备来替代磁罗盘,确实比较方便,但对稳定性一直有顾虑。近期看到思翼出了一款同时具备双天线测向和磁罗盘的RTK模块,相当于两个磁罗盘冗余,重量只有22.8g,恰好在跟一个电力巡检的项目,就搞过来测试了一下。

作为吊舱和链路领域的老牌厂家,思翼这款进驻飞控领域后的首个RTK模块可谓诚意十足。简单整理了一下这款产品的参数,放在了下面的表格中。在面价1800元左右的设备里可以算性价比很高。磁罗盘用的是RM3100,搭配单模块双天线测向功能,定位精度在水平0.8cm+1ppm,高程1.5cm+1ppm,双模块测向精度0.2度/1m基线,数据刷新率最大能到20Hz,实测在电塔环境下飞行比较稳定。

这款RTK有一个好处,接基站端不需要接电脑,直接用他家UniGCS软件,基站连接到地面站上,就能直接RTK定位定向。这一点就很方便,不需要每次出门都带一台电脑放在旁边。毕竟网络RTK需要依赖移动网络,电塔又大多比较偏远。基站我选用的是他家的F9P RTK,同一个厂家出品,兼容性更放心点。

下单后很快收到货,地面站我直接配了他家的UniRC 7Pro,吊舱用的是ZT30,飞控用的N7,整体配件如下。选思翼家的产品有一点好,什么都有,可以全套打包,不用操心兼容的事儿,省了不少时间。

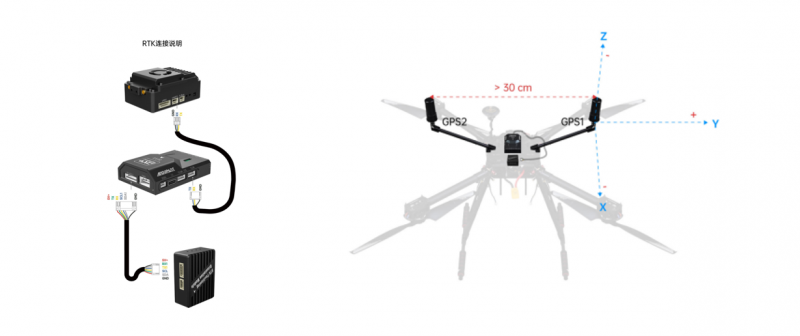
直接用3M胶将RTK模块安装在机架上,连接好RTK和飞控、飞控和数传链路天空端。本次用Ardupilot固件测试,按照说明书,串口配置SERIAL3_PROTOCOL=5 (GPS),GPS1_TYPE = 25(UnicoreMovingBaseline)。打开地面站,GPS_YAW航向与实际航向一致,双天线测向生效。
据说这款RTK还可以支持PX4固件,本次我没有测试,把他家说明书上的相关内容放出来。

进入实际测试环节,直接在附近电塔旁搭好基站,悬停测试,靠近基站大概3-5米,实际表现如下图,整体比较稳定。自动导航测试,设置航线后能够稳定沿航线实现电塔巡线,实现了高电磁干扰环境的稳定画面。

值得一提的是,在准备打点做航线规划时候,发现他们家UniGCS还具备航带航线的功能,可以自动转弯规划航线,整体还比较精准,能省下不少打点的时间。整体测试过程画面也很稳定,更没什么花屏现象。抗磁场能力很优秀,感觉在无人车上也能有不错的表现。期待之后能在更多的项目里派上用场。
「免责声明」:以上页面展示信息由第三方发布,目的在于传播更多信息,与本网站立场无关。我们不保证该信息(包括但不限于文字、数据及图表)全部或者部分内容的准确性、真实性、完整性、有效性、及时性、原创性等。相关信息并未经过本网站证实,不对您构成任何投资建议,据此操作,风险自担,以上网页呈现的图片均为自发上传,如发生图片侵权行为与我们无关,如有请直接微信联系g1002718958。
